- Überblick
- 1. Hinführung
- 2. CAN-Kommunikation
- 3. CAN-Framing
- 4. CAN-Buszugriff
- 5. CAN-Datensicherung
-
6. CAN FD
- Motivation für CAN FD
- Vorteile und Konsequenzen
- Neue Botschaftsformate
- Details der CAN FD Botschaft
- CAN oder CAN FD, die Unterscheidung
- Kompatibilität von CAN und CAN FD Controllern
- Beschleunigte Übertragung
- Selbstanzeige bei zu häufigen Fehlern
- Länge des Datenfelds
- Mehr Daten bei gleichbleibender Sicherheit
- Geändertes Bitstuffing und CRC-Berechnung
Einführung in CAN
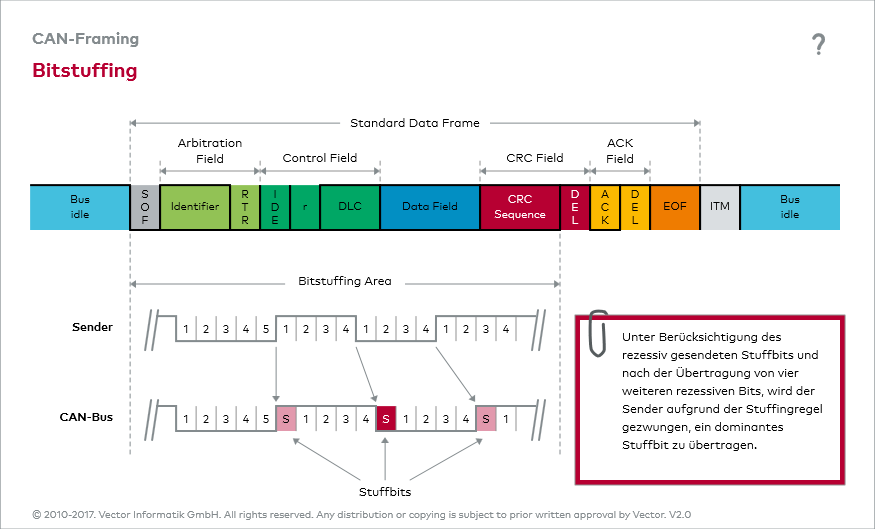
Bitstuffing
Abschlussbedingungen
Synchronisation
Grundvoraussetzung für eine korrekte Datenübertragung sind synchronisierte Kommunikationspartner. Zur Herstellung des Gleichlaufs dient die von rezessiv nach dominant wechselnde Signalflanke des Startbits (Start of Frame - SOF) einer CAN-Botschaft. Ein Resynchronisationsmechanismus sorgt im Anschluss an das SOF für die Beibehaltung des Gleichlaufs bis zum Ende der Botschaftsübertragung.
Resynchronisation
Der Resynchronisationsmechanismus basiert auf der Auswertung der von rezessiv nach dominant wechselnden Signalflanken. Die Sicherstellung solcher Signalflanken erfolgt durch den so genannten Bitstuffingmechanismus. Die ISO 11898-1 schreibt den Sendern vor, spätestens nach fünf homogenen Bits ein komplementäres Bit zu übertragen, auch dann, wenn nach fünf homogenen Bits ohnehin ein komplementäres Bit folgen würde.
Bitstuffing-Bereich
Weil das Bitstuffing mit der Übertragung des SOF beginnt und mit der Übertragung des letzten Bits der CRC-Sequenz endet, ergeben sich für die Übertragung eines Data Frames im Standard-Format im Worst-Case-Fall, also wenn das Data Field acht Nutzbytes umfasst, theoretisch 24 Stuffbits. Infolgedessen setzt sich der längstmögliche Data Frame im Standard-Format theoretisch aus 132 Bit zusammen.
Mithilfe der interaktiven Grafik „Bitstuffing“ wird Ihnen der Bitstuffingmechanismus schnell klar werden.
Zuletzt geändert: Mittwoch, 22. September 2021, 10:54