標準化
CANプロトコル
CANの技術は1994年から標準化され4つのISO文書で記述されている。 ISO 11898-1はCANプロトコルについて記述されている。 データ通信の参照モデルに関連して、CANプロトコルはData Link Layer(MAC – Medium Access Control , LLC – Logical Link Control)と物理層(PLS – Physical Signaling)だけをカバーしている。
CANコントローラー
CANプロトコルはハードウェアに実装されていて、CANメッセージの処理方法が異なる多くのCANコントローラーが入手可能になっている。 これらの違いはオブジェクト層にあらわれ、CANコントローラーはオブジェクトストレージを持つもの(Full CANコントローラーと呼ばれる)とオブジェクトストレージを持たないもの(Basic CANコントローラーと呼ばれる)で区別される。
CANハイスピード & CANロースピード
2つのISO文書 ISO 11898-2とISO 11898-3はデータ通信参照モデルの2つのサブレイヤーをカバー:PMA(Physical Medium Attachment)とPMS(Physical Medium Specification)。 これら2つの異なるCAN物理層について説明する:High-Speed CAN物理層とLow-Speed CAN物理層。 これらは電圧とデータ転送速度(データ速度)が主に異なる。
データレート
ISO 11898-3は最大 125 kbit/s のデータ速度が可能で、これは主に自動車の快適分野で使用される。ISO 11898-2は最大 1 Mbit/s のデータ速度が可能、その結果ISO 11898-2は自動車のパワートレインとシャシー分野で主に使用される。
規格には物理層のサブレイヤーのMDI(Medium Dependent Interface)は存在しない。 CiA DS-102(CiA: CAN in Automation)では特定のピンアサインに適合する特定のコネクター(SUB-D9)の使用を勧めている。
イベントドリブン通信
ISO 11898-1はイベントドリブン通信を定義している。 バスの高負荷は特に低優先度CANメッセージの遅延につながる可能性がある。 CANネットワークで確定通信を確保するためにISO 11898-4が利用可能でISO 11898-4はCANをベースにしたネットワーク用のタイムトリガー通信オプションを追加したData Link Layerの拡張になる。
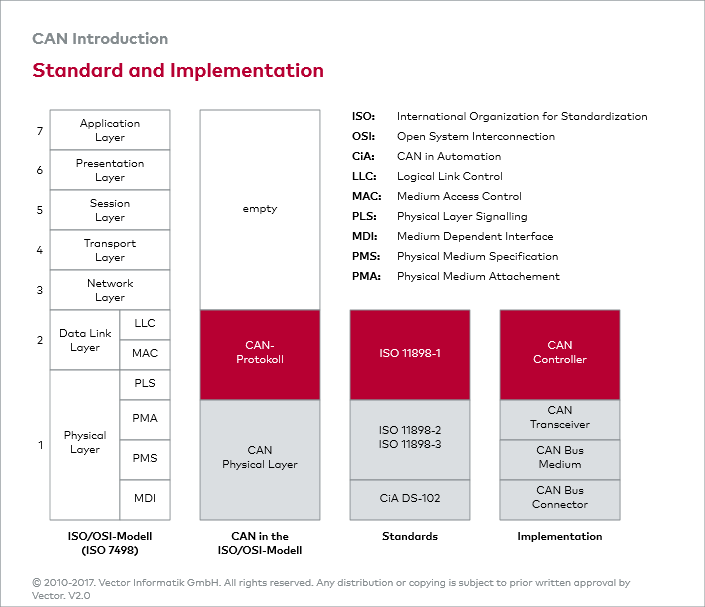
ISO/OSIリファレンスモデル
図 “Standard and Implementation”はデータ通信のISO/OSI参照モデルとCAN標準とその実装の関係を示している。