CAN入門
CANバスロジック
完了要件
ドミナント / レセシブ
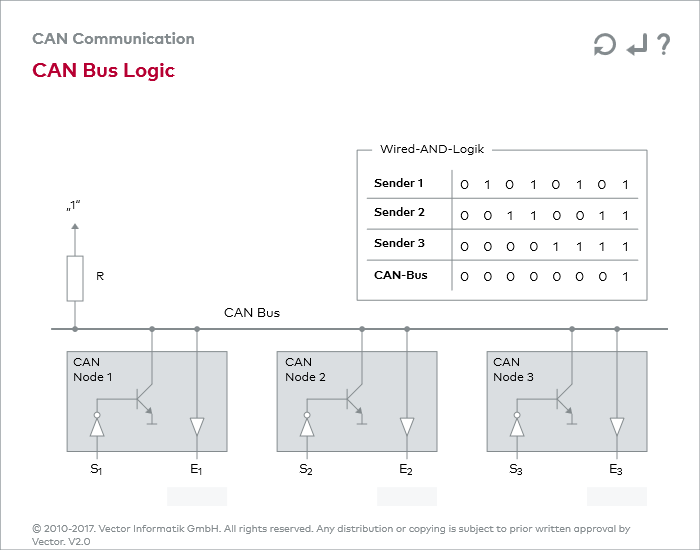
CANネットワークでの円滑な通信用の基本前提条件は-特にバスアクセス、障害表示、アクノリッジメント-で、ドミナントとレセシブバスレベルの明確な区別になる。 ドミナントバスレベルは論理”0”に対応し、レセシブバスレベルは論理”1”に対応している。
ドミナントバスレベルはレセシブバスレベルを上書きする。 異なるCANノードがドミナントとレセシブバスレベルを同時に送信した場合、CANバスはドミナントバスレベルと仮定する。レセシブバスレベルは全CANノードがレセシブバスレベルを送信時のみに発生する。
ANDロジック
このような動作は論理面ではAND-Logicとなる。 物理的には、AND-Logicはいわゆるオープンコレクタ回路で実装される。インタラクティブな図”CANバスロジック”でCANネットワークの基になっているwired-ANDバスロジックについて学ぶ事が出来る。
最終更新日時: 2019年 02月 20日(水曜日) 17:08