CAN入門
CANトランシーバー
完了要件
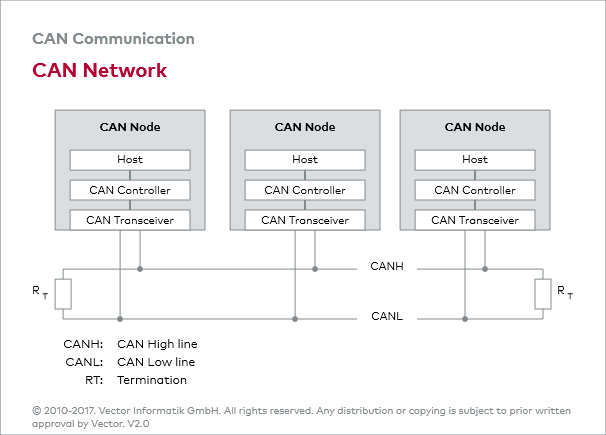
バス接続
初期の頃にはCANコントローラーはディスクリート回路により通信媒体(CANバス)に接続されていた。 しかし今日ではCANトランシーバーがバスへの接続を扱う。 CANトランシーバーは通常2つのバス端子を備える:1つはCAN High線(CAN-H) もう1つはCAN Low線(CAN-L)。 これはCANネットワークの物理的信号伝送が電磁互換性を達成するため対称的でありCANネットワークの物理的伝送媒体は2本のラインで構成されている。
ハイ / ロースピード
通常はHigh-Speed CANトランシーバーとLow-Speed CANトランシーバーに区別される。 High-Speed CANトランシーバーは最大 1 Mbit/s のデータレートをサポートしている。 Low-Speed CANトランシーバーは最大 125 kbit/s までのデータレートをサポートするが、Low-Speed CANトランシーバーはバスインターフェースでフォールトトレラントなレイアウトを確保出来る(例:2本の通信線の1本に問題が起きても全体的な通信障害にならない)。
トランシーバーのレイアウト
図”CANトランシーバ”はHigh-Speed CANトランシーバーの基本レイアウトを示している。 両方の出力トランジスタが遮断されている場合、両方のCANラインは同電位(0.5*Vcc)であると仮定され、作動電圧は0となる。 するとすぐに両方のトランジスタが導通し、これにより負荷抵抗の機能で2本のライン間に差電圧を生成する。 ISO 11898-2では、この差は 2 ボルトにする必要がある。したがって電流は約 35 流れる。
ノイズ耐性
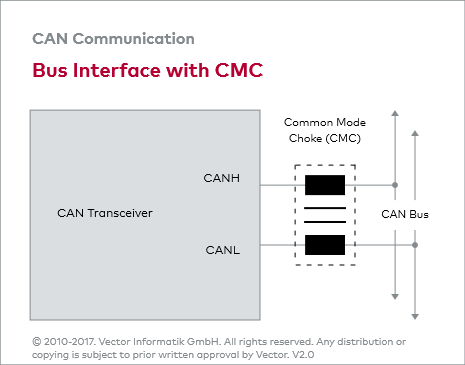
一般的に、CANトランシーバーは高ノイズ耐性用の非常に低い電磁放射と広いコモンモード動作レンジが特徴と言える。 さらに、現在のCANトランシーバーは 8 kV のESD保護を提供出来る。 非常にクリティカルな使用分野においては、高いコモンモード除去能力にもかかわらず出力付近に挿入するコモンモードチョーク(CMC)でさらに排出量を削減出来る。
制限事項
ISO11898でCANノードの最大数は32と規定されている。 実際にはCANノードの最大数は、High-SpeedまたはLow-Speed CANネットワークと使用されるCANトランシーバーの能力に依存し多く出来る。 例えば、TJA1050 High-Speed CANトランシーバーをHigh-Speed CANネットワークで使用する場合、仕様に従い1つのCANネットワークに最大110台のCANノードを接続できる。
![]()
最終更新日時: 2019年 02月 20日(水曜日) 16:56