CAN入門
リモートフレーム
完了要件
リクエストデータ
データ転送に使用されるデータフレームの他にリモートフレームがある-これはデータ(いずれかのCANノードからのデータフレーム)を要求するフレーム型になる。 しかし、これらのフレームは自動車でのアプリケーションにおいてほとんど使用されてなく、データ伝送は要求では無く、むしろ情報生産者(ECU)の自主性に基づいている。 リモートフレームは標準フォーマットまたは拡張フォーマットで送信される。
RTRによる決定
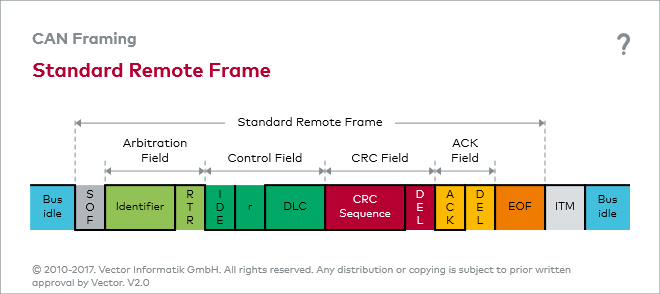
データフィールドが無い事を除き、リモートフレームのレイアウトはデータフレームと同一となる。データフレームとリモートフレームはRTRビット(Remote Transmission Request Bit)によって区別される。 データフレームの場合、RTRビットはドミナントとして送信される。リモートフレームはレセシブのRTRビットによって識別される。
2つのフレーム、
原理として、リモートフレームはCANネットワークの全ての既存データフレーム用に定義される。 それは、リモートフレームの識別子が関連データフレームのものと一致する事を保証するためにだけ必要になる。 ECUはリモートフレームに応答する要求されたデータフレームを生成し送信する責任を持つ。
リモートフレームとレスポンス
オブジェクトストレージを持つCANコントローラーの場合、CANコントローラーは自動的にリモートフレームに応答する。 オブジェクトストレージを持たないCANコントローラーは応答を開始出来るようにリモートフレームをホストに認識させる必要がある。
理想的なケースでは、リモートフレームによる要求は、すぐに関連データフレームの応答につながる。 しかし、高優先順位のCANメッセージが要求と応答間に入る可能性がある。
最終更新日時: 2019年 02月 20日(水曜日) 17:24