CAN入門
CAN通信の原理
完了要件
分権化
パワートレイン領域にあるような安全重視のアプリケーションは通信システムの稼働性に厳しい要求をする。だから、バス配信の責任を1台のバスノードへ割り当てる事は不利になる。この脆弱性がバスノードの全通信が失敗する原因となる。これに対する素晴らしいソリューションは、各バスノードがバスへのアクセス権を持つようにバスアクセスを分散化する事である。
イベント駆動
CANネットワークがマルチマスター構造とライントポロジーの組み合わせに基づいている理由
- 基本的に各CANノードはCANネットワークのバスにCANメッセージを配置する権限を与えられている
- CANメッセージの送信は、事前決定された時間シーケンスには従わずイベントドリブンとなる
新しい情報を実際に送信する必要がある場合、通信チャンネルはビジーになり、これによって非常に迅速なバスアクセスが可能になる。 原理としてCANネットワークでのミリセコンド単位のリアルタイムデータ伝送に関して問題は無く、それは非同期イベントに迅速に反応する能力と1MBit/sという非常に高いデータレートによる。
受信機-選択アドレッシング
受信機が選択アドレッシング手法を使用する事でバスノード間の依存関係を防止し、構成の柔軟性を向上させるCANネットワークとなる: 全CANメッセージは全CANノードが受信し利用可能(ブロードキャスト)。 前提条件としてメッセージ識別子(ID)とノード固有のフィルタリングにより各CANメッセージを認識する事を可能にしなければならない。 これはオーバーヘッドを増加させるが、CANネットワークの変更を必要とせず追加CANノードの統合が可能となる。
CANでの通信
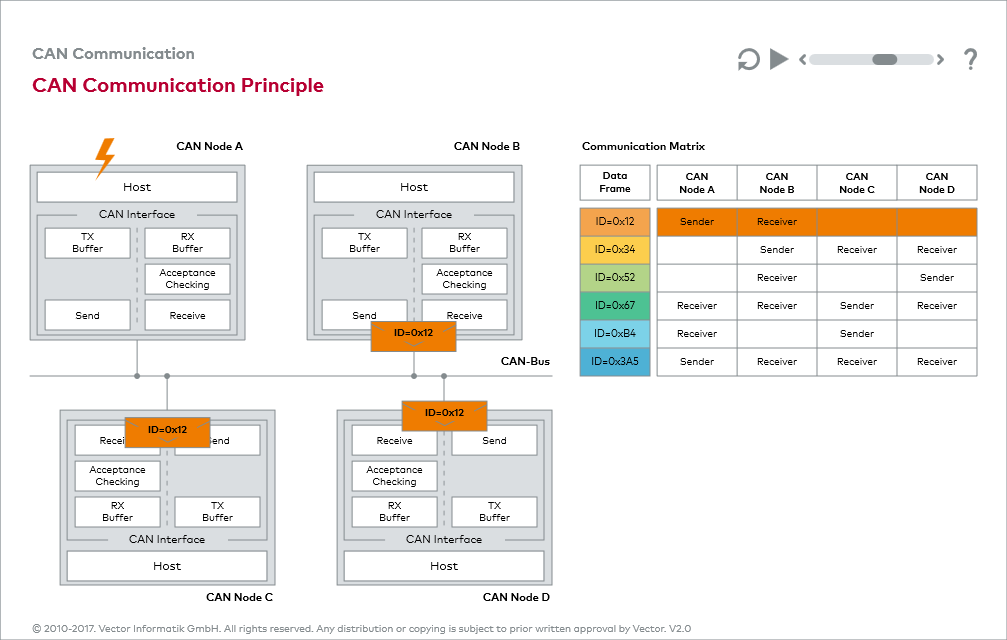
アニメーション”CAN通信の原理”はCANネットワークでのメッセージ送信を練習出来、CAN通信マトリクスと受諾フィルタの使用方法も学ぶことが出来る。説明を読むことによりアニメーションの全機能を完全に使用出来る。
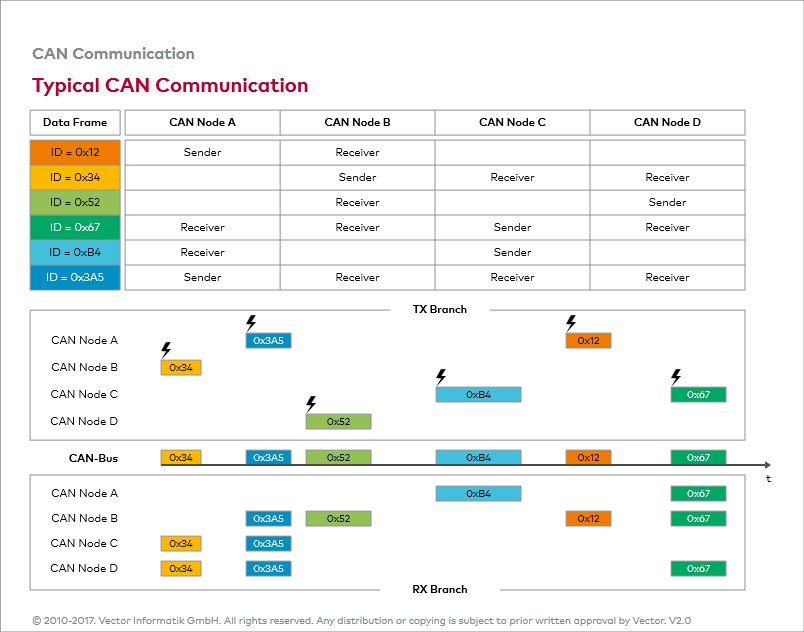
図”典型的なCAN通信”はアニメーション”CAN通信の原理”に直接従い、典型的な通信シーケンスを示している。これはCANネットワークの基礎となる通信マトリクスだけでなく、送受信ブランチも結果として示している。
最終更新日時: 2019年 02月 20日(水曜日) 17:11