CAN入門
CANコントローラー
完了要件
CANインターフェース
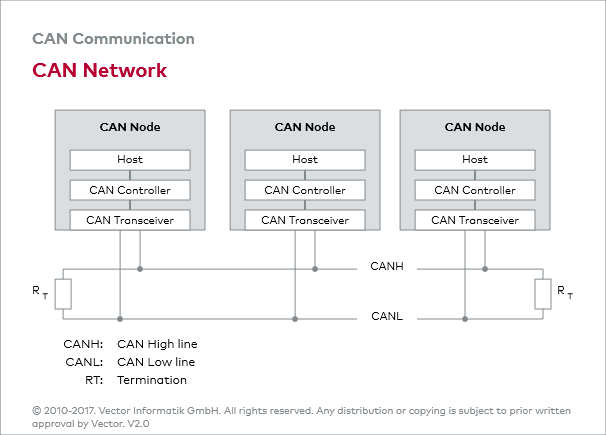
CAN通信に参加する電子制御装置(ECU)はCANインターフェースを必要とする。 これはCANコントローラーとCANトランシーバーで構成されている。CANコントローラーはホストのリソースをより多く解放しCANプロトコルで規定された通信機能を満たす。
CANトランシーバー
CANトランシーバーはCANコントローラーを物理伝送媒体に接続する。 通常、2つのコンポーネントは光学的または磁気デカップリングにより電気的に絶縁される。CANバスでの過電圧はCANトランシーバーを破壊するがCANコントローラーとホストは影響を受けない。
送信 / 受信
CANネットワークではCANノードはそれぞれ送受信できるメッセージ数が異なる。 また送信と受信では頻度に大きな違いがある。 例えば、あるCANノードは5つの異なるCANメッセージをそれぞれ10mS周期で受信し、別のCANノードは100mS周期で1つのCANメッセージ受信を必要としている。 これらの明らかな違いにより2つの基本的CANコントローラー構造がもたらされた: オブジェクトストレージを持つCANコントローラーとオブジェクトストレージを持たないCANコントローラー
統合
CANコントローラーの種類に関係なく、CANコントローラーは統合または(図で示すように)スタンドアローンのチップコンポーネントとして使用される。この例ではマイクロコントローラーはCANコントローラーをメモリーチップのように扱う。 スタンドアローンタイプは柔軟性が有るが、チップ内蔵タイプは少ない実装面積が利点でマイクロコントローラーとCANコントローラー間の通信が速く信頼性も高い。
最終更新日時: 2019年 02月 20日(水曜日) 16:53