CAN入門
バスアクセスの原理
完了要件
全ノードへのバスアクセス
ISO 11898-1は高可用性とイベントドリブンのデータ伝送を確保するためにマルチマスターアーキテクチャーを定義している。CANネットワーク内の各ノードは他CANノードのアクセス許可と事前調整無しにCANバスへアクセス出来る権利を持っている。バスアクセスはイベントドリブンに基づき、イベントに対して非常に迅速な反応を可能にしている。これには固有リスクとして複数CANノードが同時にCANバスにアクセスする可能性が有り、CANバス上で望ましくないデータのオーバーラップにつながる。
衝突回避
通信システムのリアルタイム能力を維持するため、ISO 11898-1は非破壊データ転送を保証しているバスアクセスを提供する。いわゆるCSMA/CA(Carrier Sense Multiple Access with Collision Avoidance)方式が使われる。CSMA/CA方式は送信したいノードが送信可能になるまでCANバスにアクセスしない事を保証する。
ビットごとのバス調停
同時バスアクセスの場合、ビット単位のバス調停に基づくCSMA/CA方式は、最高優先順位のCANメッセージがCANノード間で勝つ事を保証する。 原理的に高優先順位のCANメッセージはCANバスにより早く伝送する事が出来る。 劣ったシステム設計の場合、低優先順位のCANメッセージが絶対に送信されないリスクが考えられる。
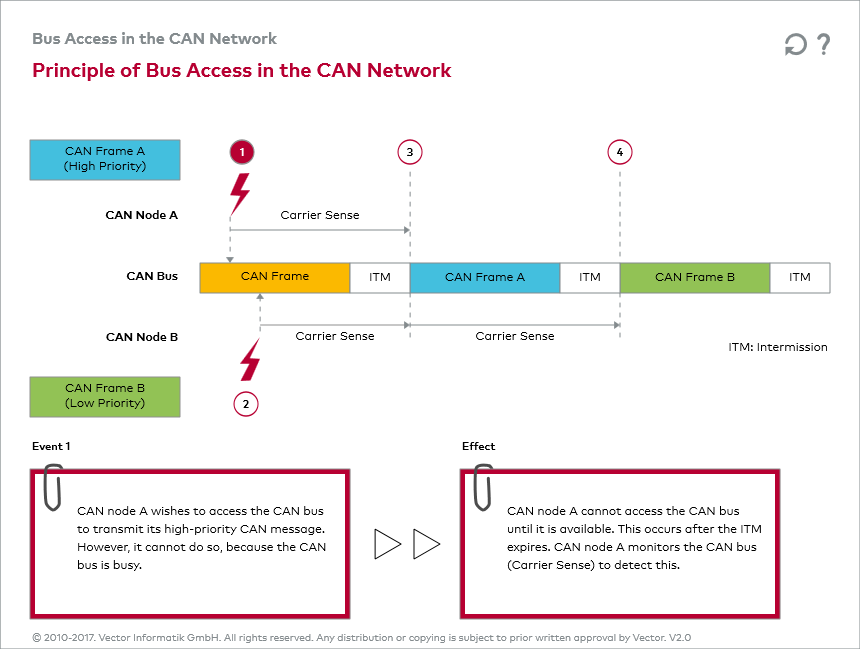
インタラクティブな図”CANネットワークでのバスアクセスの原理”は理解しやすいように提供されている。 これは現在進行しているメッセージの伝送中に2台のCANノードがバスアクセスを待機しているシナリオを想定している。
最終更新日時: 2019年 02月 20日(水曜日) 17:32