CAN入門
ビット単位のバス調停
完了要件
CSMA/CA
ISO 11898-1ではバスアクセス方式の主要コンポーネントはビット単位のバス調停と定義されている。 これは同時バスアクセスが発生しても衝突を防ぐことが出来る。 ビット単位のバス調停の原理は比較的簡単である。
ユニークなバスレベル
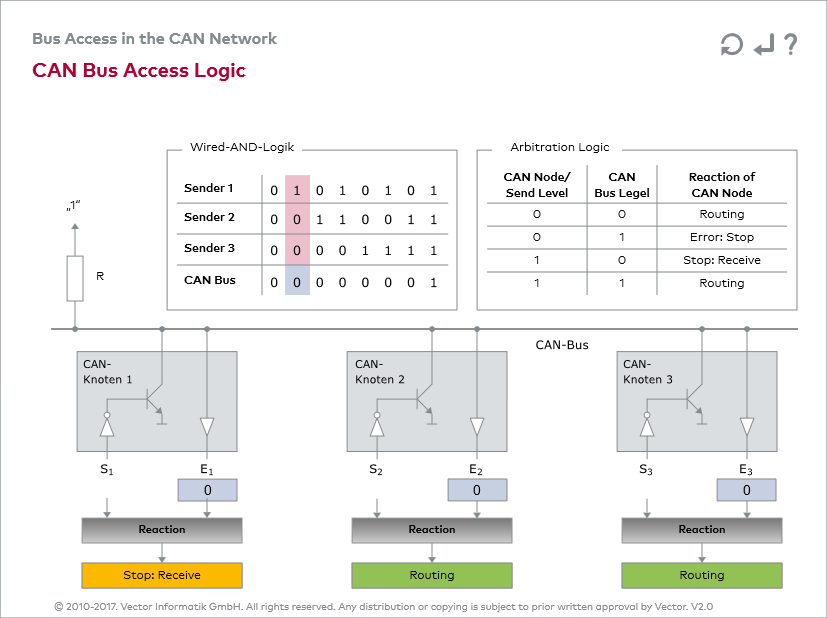
ネットワーク全体の同期後、送信を行いたい全CANノードはCANメッセージの識別子(ID)をビット単位で最上位ビットから最下位ビット順でCANバスに送る。 このプロセスでは、CANネットワークが基づいているwired-ANDバスロジックはバス上で明確に異なるバスレベルの結果を保証する。
調停ロジック
最後に調停ロジックはCANノードが送信を継続するか停止するかを決定する。 インタラクティブな図”CANバスアクセスロジック”によってビット単位のバス調停メカニズムをより身近に知ることが出来る。
1度に1台の送信機
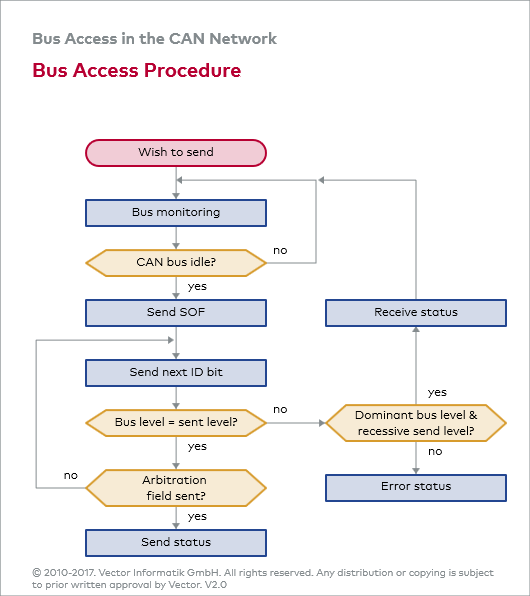
調停フェーズの終了時に、最小のIDを持つCANメッセージを送信するCANノードが送信許可を取得する。 低優先順位メッセージのCANノードは受信状態に切り替えられ、CANバスが後で再び利用可能になると別の送信試行のためアクセスを行う。図”バスアクセス手順”はバスアクセスの状況におけるCANノードの全動作を示す。
知識強化
CANネットワークにおけるバスアクセスの知識を深めるために”ビット単位のバス調停”を使用できる。 シミュレーションは送信したい3台のノードから構成されるCANネットワークに基づいている。 3台のCANノードで送信されるCANメッセージの識別子(ID)をそれぞれ設定できる。
最終更新日時: 2019年 02月 20日(水曜日) 17:38